


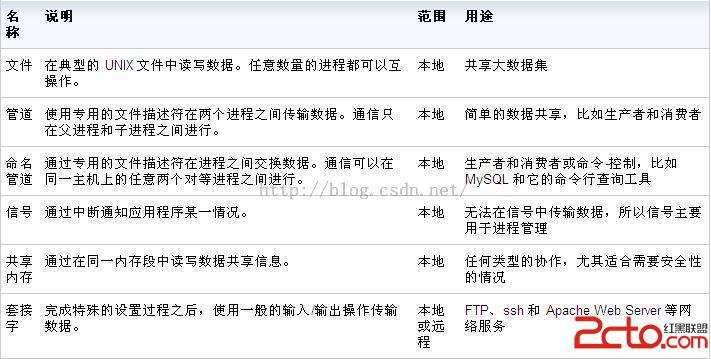
進程間通信至少可以通過傳送打開文件來實現,不同的進程通過一個或多個文件來傳遞信息,事實上,在很多應用系統裡,都使用了這種方法。但一般說來, 進程間通信(IPC:InterProcess Communication)不包括這種似乎比較低級的通信方法。Unix系統中實現進程間通信的方法很多,而且不幸的是,極少方法能在所有的Unix系 統中進行移植(唯一一種是半雙工的管道,這也是最原始的一種通信方式)。而Linux作為一種新興的操作系統,幾乎支持所有的Unix下常用的進程間通信 方法:管道、消息隊列、共享內存、信號量、套接口等等。
管道概念
管道是Unix中最古老的進程間通信的形式,我們把從一個進程連接到另一個進程的一個數據流稱為一個“管道”, 管道的本質是固定大小的內核緩沖區;它包括無名管道和有名管道兩種,前者用於父進程和子進程間的通信,後者用於運行於同一台機器上的任意兩個進程間的通信。
管道限制
1)管道是半雙工的,數據只能向一個方向流動;需要雙方通信時,需要建立起兩個管道;
2)匿名管道只能用於具有共同祖先的進程(如父進程與fork出的子進程)之間進行通信, 原因是pipe創建的是兩個文件描述符, 不同進程直接無法直接獲得;(通常,一個管道由一個進程創建,然後該進程調用fork,此後父子進程共享該管道)
匿名管道創建
#includeint pipe(int pipefd[2]);
參數
Pipefd:文件描述符數組,其中pipefd[0]表示讀端,pipefd[1]表示寫端,示意圖如下:
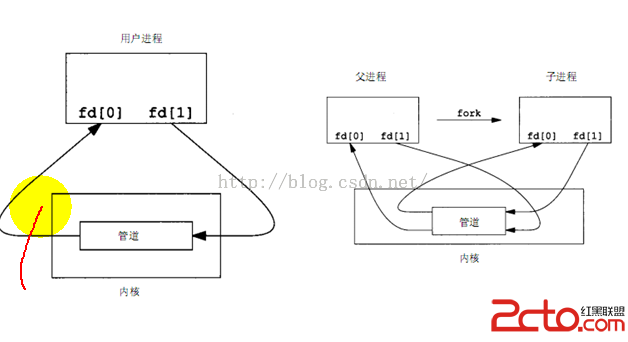
(1)接下來,我們利用匿名管道來進行父子進程之間的通信,子進程向父進程發送信息。
int main()
{
int pipefd[2];
if(pipe(pipefd)==-1)
ERR_EXIT("pipe error!");
pid_t pid;
pid=fork();
if(pid==-1)
ERR_EXIT("fork error");
if(pid==0)
{
close(pipefd[0]);
write(pipefd[1],"hello",5);
close(pipefd[1]);
exit(EXIT_SUCCESS);
}
close(pipefd[1]);
char buf[10]={0};
read(pipefd[0],buf,10);
printf("buf=%s\n",buf);
return 0;
}
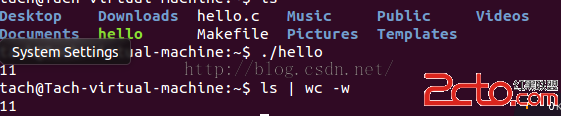
結果:父進程接收到子進程發送的hello
(2)我們來模擬實現管道命令 ls | wc -w 關鍵點就是:
1.子進程運行ls,dup2(pipefd[1],STDOUT_FILENO)重定向標准輸出,定位到管道寫端,ls寫入到管道寫端而不是標准輸出設備;
2.父進程運行wc -w ,wc獲取數據的時候從管道讀端獲取,不再從標准輸入設備。
3.通過管道, 將子進程的輸出發送到wc的輸入 。
int main()
{
int pipefd[2];
if(pipe(pipefd)==-1)
ERR_EXIT("pipe error!");
pid_t pid;
pid=fork();
if(pid==-1)
ERR_EXIT("fork error");
if(pid==0)
{
dup2(pipefd[1],STDOUT_FILENO);//重定向輸出
close(pipefd[0]);
close(pipefd[1]);
execlp("ls","ls",NULL);//若出錯才執行下面的代碼
fprintf(stderr,"error execute ls\n");
exit(EXIT_FAILURE);
}
dup2(pipefd[0],STDIN_FILENO);
close(pipefd[0]);
close(pipefd[1]);
execlp("wc","wc","-w",NULL);
fprintf(stderr,"error execute wc\n");
exit(EXIT_FAILURE);
return 0;
}
不帶任何參數的cat命令是從標准輸入讀入命令,寫到標准輸出。0->Makefile ; 1->Makefile2;
int main()
{
close(0);
open("Makefile",O_RDONLY);
close(1);
open("Makefile2",O_WRONLY | O_CREAT | O_TRUNC,0644);
execlp("cat","cat",NULL);
return 0;
}
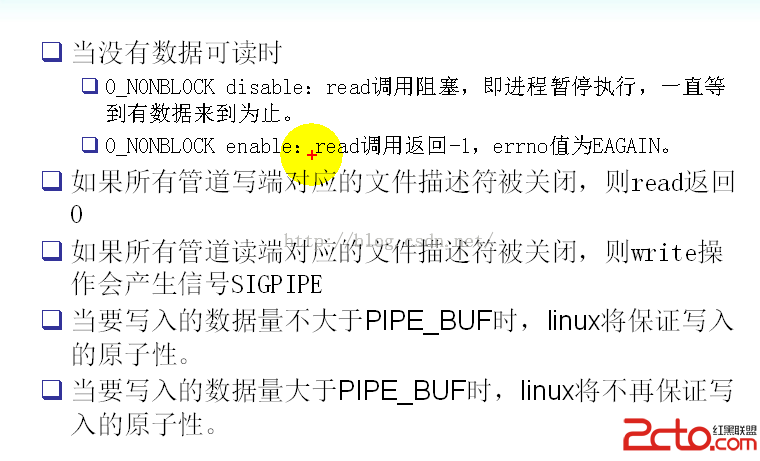
管道的讀寫規則
我們對以上的規則一一進行驗證。
(1)如果管道為空,那麼read會阻塞(模式),如果使用非阻塞模式的話,也就是使用fcntl函數,對模式進行修改後
int flags=fcntl(pipefd[0],F_SETFL,flags | O_NONBLOCK); read(pipefd[0],buf,10);
此時,讀操作會失敗,顯示資源暫且不可用的錯誤。
(2)管道的寫端關閉,read打印輸出0,但是並不報錯誤,顯示讀到了文件的末尾。
int main()
{
int pipefd[2];
if (pipe(pipefd) != 0)
err_exit("pipe error");
pid_t pid = fork();
if (pid == -1)
err_exit("fork error");
else if (pid == 0)
{
close(pipefd[1]);
exit(EXIT_SUCCESS);
}
close(pipefd[1]);
sleep(2);
char buf[2];
if (read(pipefd[0], buf, sizeof(buf)) == 0)
cout << "sure" << endl;
}
(3)如果所有管道讀端對應的文件描述符被關閉,則write操作會產生信號SIGPIPE,進程終止。如果我們自定義SIGPIPE的處理函數的話會生效。
int main()
{
if (signal(SIGPIPE, handler) == SIG_ERR)
err_exit("signal error");
int pipefd[2];
if (pipe(pipefd) != 0)
err_exit("pipe error");
pid_t pid = fork();
if (pid == -1)
err_exit("fork error");
else if (pid == 0)
{
close(pipefd[0]);
exit(EXIT_SUCCESS);
}
close(pipefd[0]);
sleep(2);
char test;
if (write(pipefd[1], &test, sizeof(test)) < 0)
err_exit("write error");
}
會打印出 singal error錯誤。
(4)關於PIPE_BUF和原子性操作之間的關系,
已知管道的PIPE_BUF為4K, 我們啟動兩個進程A, B向管道中各自寫入68K的內容, 然後我們以4K為一組, 為了方便我們查看管道最後一個字節的內容, 多運行該程序幾次, 就會發現這68K的數據會有交叉寫入的情況 。
int main()
{
const int TEST_BUF = 68 * 1024; //設置寫入的數據量為68K
char bufA[TEST_BUF];
char bufB[TEST_BUF];
memset(bufA, 'A', sizeof(bufA));
memset(bufB, 'B', sizeof(bufB));
int pipefd[2];
if (pipe(pipefd) != 0)
err_exit("pipe error");
pid_t pid;
if ((pid = fork()) == -1)
err_exit("first fork error");
else if (pid == 0) //第一個子進程A, 向管道寫入bufA
{
close(pipefd[0]);
int writeBytes = write(pipefd[1], bufA, sizeof(bufA));
cout << "A Process " << getpid() << ", write "
<< writeBytes << " bytes to pipe" << endl;
exit(EXIT_SUCCESS);
}
if ((pid = fork()) == -1)
err_exit("second fork error");
else if (pid == 0) //第二個子進程B, 向管道寫入bufB
{
close(pipefd[0]);
int writeBytes = write(pipefd[1], bufB, sizeof(bufB));
cout << "B Process " << getpid() << ", write "
<< writeBytes << " bytes to pipe" << endl;
exit(EXIT_SUCCESS);
}
// 父進程
close(pipefd[1]);
sleep(2); //等待兩個子進程寫完
char buf[4 * 1024]; //申請一個4K的buf
int fd = open("save.txt", O_WRONLY|O_TRUNC|O_CREAT, 0666);
if (fd == -1)
err_exit("file open error");
while (true)
{
int readBytes = read(pipefd[0], buf, sizeof(buf));
if (readBytes == 0)
break;
if (write(fd, buf, readBytes) == -1)
err_exit("write file error");
cout << "Parent Process " << getpid() << " read " << readBytes
<< " bytes from pipe, buf[4095] = " << buf[4095] << endl;
}
}
