描述:這篇文章主要介紹ROS(機器人操作系統,Robot Operating System)的用途及安裝方式;
1.1 ROS的主要用途
ROS(機器人操作系統,Robot Operating System),是專為機器人軟件開發所設計出來的一套電腦操作系統架構。它是一個開源的元級操作系統(後操作系統),提供類似於操作系統的服務,包括硬件抽象描述、底層驅動程序管理、共用功能的執行、程序間消息傳遞、程序發行包管理,它也提供一些工具和庫用於獲取、建立、編寫和執行多機融合的程序。
ROS的運行架構是一種使用ROS通信模塊實現模塊間P2P的松耦合的網絡連接的處理架構,它執行若干種類型的通訊,包括基於服務的同步RPC(遠程過程調用)通訊、基於Topic的異步數據流通訊,還有參數服務器上的數據存儲。
1.2 ROS安裝方式
ROS可以安裝到多種平台上,目前支持最全的是Ubuntu操作系統平台,推薦在Windows平台下采用虛擬機的方式進行安裝,方便下一步的學習實驗;
官方提供的最新版(ROS Groovy Galapagos)安裝鏡像地址如下:http://nootrix.com/downloads/#RosVM
虛擬機下載網站為:https://www.virtualbox.org/
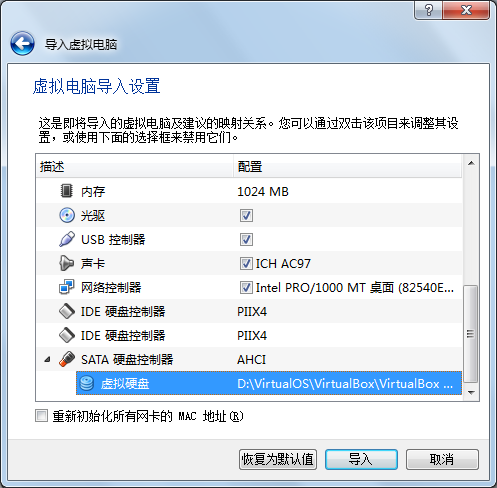
安裝完Oracle VM VirtualBox後,點擊菜單“管理”->“導入虛擬電腦”->“打開虛擬電腦”
選擇下載的“rosGroovyGalapagos.ova”文件;
在虛擬電腦導入配置選項中,建議調整一下虛擬硬盤的位置到空間比較大的硬盤區,如時飛安裝的位置為“D:\VirtualOS\VirtualBox”,如下圖所示:
安裝完畢後啟動虛擬機,默認用戶名及密碼都是“viki”,運行後如下所示:
我們試著在命令終端“Terminal”中輸入ROS指令“roscore”,會出現如下信息:
現在,虛擬機安裝完畢了,以後我們可以利用這個虛擬機進一步學習有關ROS的相關內容了。